APPAREILLAGE ÉLECTRIQUE
|
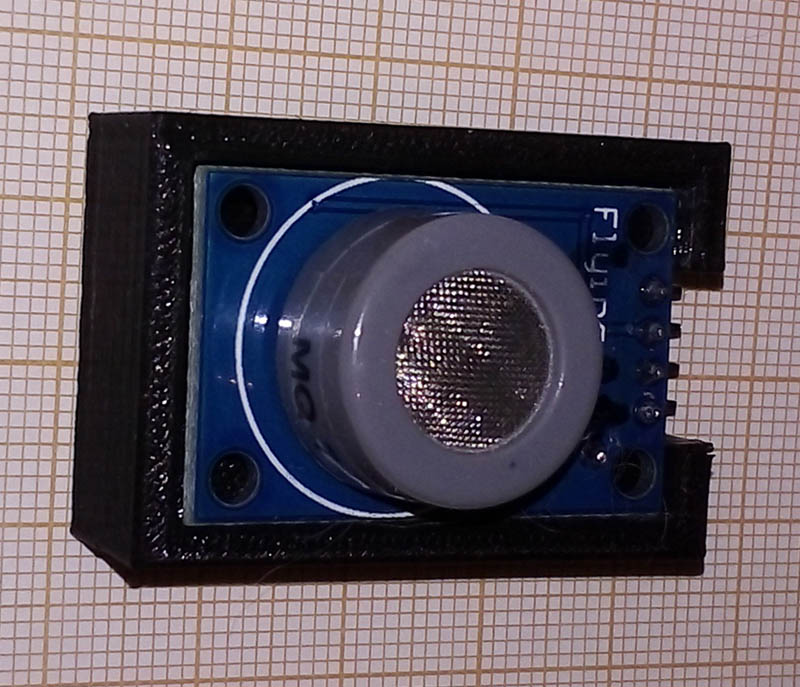
Carte Arduino, afficheur LCD. La carte Arduino commande les servo moteurs de trim (profondeur et direction) ainsi que le moteur pas à pas des volets. Ce dispositif a été abandonné pour un système mécanique. L'afficheur LCD était initialement prévu pour indiquer le débit de la batterie. Il est remplacé par une mesure de l'oxyde de carbone présent dans l'habitacle.
|  |
| Circuit d'interface moteur / tableau de bord. Il est placé sur la cloison pare feu et regroupe l'ensemble des connexions provenant du moteur (sondes, phare, pompe à essence ....) Il est équipé d'un convertisseur 12/5 V pour alimenter la carte Arduino, les servomoteurs (trims de profondeur et de direction), la tablette GPS et d'un capteur à effet Hall pour la mesure du courant batterie. Tous les circuits sont relayés et protégés par des fusibles électroniques. Le circuit du tableau de bord ne véhicule que des courants faibles (quelques mA). |  |
| Câblage vu côté habitacle. Il ne manque que les connexions d'alimentation des servos, de la radio et du transpondeur. La nappe multicolore est raccordée au tableau de bord. Les deux fils blancs alimentent l'électrovanne d'arrivée d'essence, ce qui permet de se dispenser d'un robinet manuel, parfois peu pratique. Le circuit d'essence est automatiquement fonctionnel quand l'interrupteur principal est en service. |  |
| Câblage vu côté moteur. Les relais noirs sont utilisés pour l'alimentation de la pompe à injection et du calculateur d'allumage. Un troisième relais, non photographié, alimente le solénoïde du démarreur. |  |
| Platine électronique regroupant la carte Arduino, une alimentation 6 V pour les servos de profondeur et d'aileron, un gyroscope électronique pour la réalisation d'un pilote automatique et un module d'alimentation pour le moteur pas à pas des volets. Reste à faire fabriquer une carte électronique qui va regrouper les potentiomètres ainsi que la mise en forme des signaux du gyroscope. Pour éviter des mises au point fastidieuses, j'ai décidé de supprimer cette carte électronique et des fonctions associées. Il y a des solutions plus satisfaisantes à développer. |  |
| Antenne radio 1/4 d'onde intégrée au fuselage. L'embase est réalisée en impression 3D. |  |
Circuit électronique d'interface avec la carte Arduino. Fonctions réalisées: commande des volets, commande des trims (assiette et roulis), mise en forme des signaux du gyroscope pour le pilote automatique. Cela requiert une intégration car le capteur gyroscopique restitue des vitesses de rotation autour des plusieurs axes. Le résultat risque fort d'être médiocre. |  |
Exemple de circuit électronique d'équilibrage de batterie. On en trouve aisément sur Internet à des prix dérisoires. Est ce réellement indispensable? |  |
| Circuit électronique permettant d'interrompre la charge de la batterie à une tension de sécurité réglable. J'ai retenu 14 V pour la tension maximale. La recharge reprend quand la batterie atteint 13 V. Cela fonctionne parfaitement. Cela servira également de voltmètre au tableau de bord. |  |
| La nappe de câblage est maintenue par des clips imprimés en 3D. Il n'y a que 8 autres fils qui sont raccordés au tableau de bord pour alimenter la radio, le transpondeur, l'électronique de contrôle (servos/ flaps) et les LED situées dans les ailes |  |
Le circuit batterie est ébauché. J'ai installé un chargeur de batterie embarqué et une prise secteur qui permettra de connecter le chargeur si nécessaire. Le chargeur, fabriqué à partir d'une alimentation 12V/3A, est modifié pour limiter la charge à 14 V avec une diode de blocage pour ne pas décharger la batterie. Une trappe dans le capot donne accès à ces éléments. |  |
J'ai reçu ma batterie il y a quelques jours et j'ai terminé le câblage. La batterie est installée dans l'habitacle dans un réceptacle fabriqué avec des chutes de pièces en carbone. Ainsi elle ne sera pas exposée à la chaleur du moteur. |  |
 | |
J'ai fabriqué ces strobes en impression 3D, équipés de DEL 10W, une rouge et une verte, dans le but principal d'obturer une ouverture rendue nécessaire pour un passage de câble. Je n'ai pas encore décidé si je vais conserver cet accessoire qui est très probablement inutile pour un ULM. Il en existe de plus puissantes, mais plus volumineuses et incompatibles avec la tension batterie. Encore un peu de travail de finition avant d'installer. Cliquez sur l'image..et patientez. | 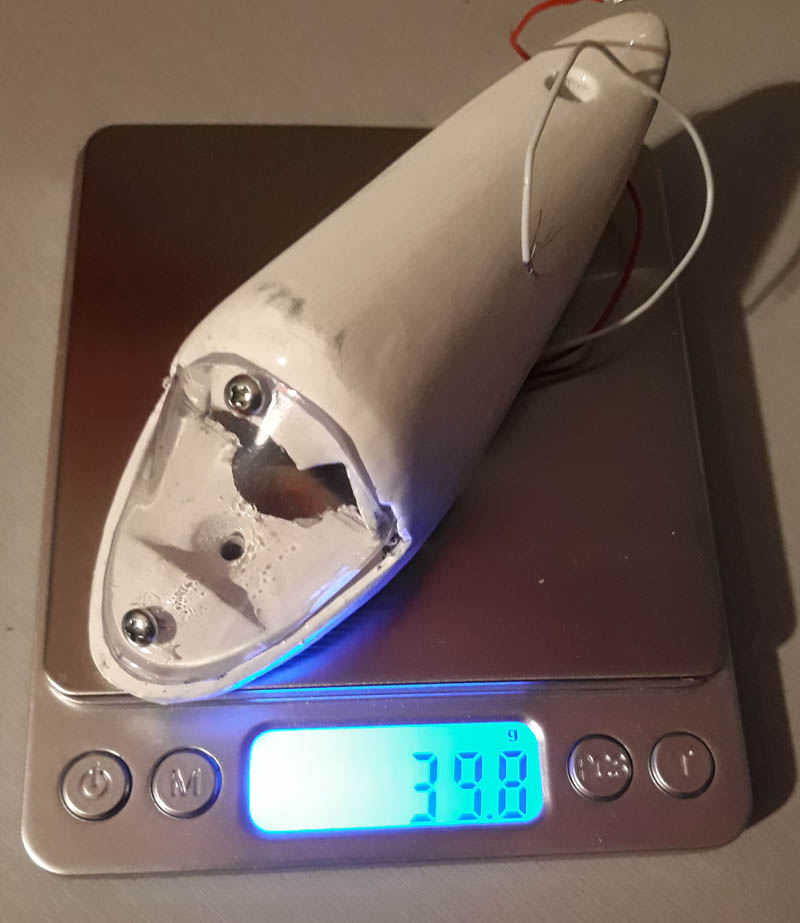 |
Les strobes et les phares sont installés, parfaitement visibles en plein jour.
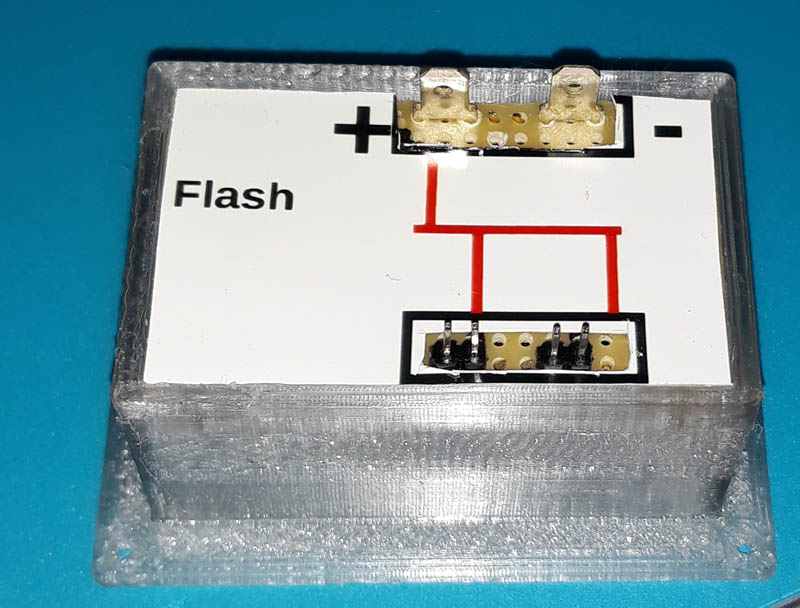
La commande de flash utilise un Arduino nano et est programmable. Le boîtier est imprimé en 3D. |  |
 | |
 | |